Question 1
What is the purpose of booting in a computer? When does it start?
The purpose of booting is to load the kernel from secondary storage to primary memory and
initialize the registers, memory and I/O devices and their controllers. After the booting the O/S is
ready to accept commands and to provide services to application programs and users.
The booting starts when you switch on the power or resets the computer.
Question 2
What are the three main purposes of an operating system?
• To provide an environment for a computer user to execute programs on computer hardware
in a convenient and efficient manner.
• To allocate the separate resources of the computer as needed to solve the problem given.
The allocation process should be as fair and efficient as possible.
• As a control program it serves two major functions: (1) supervision of the execution of user
programs to prevent errors and improper use of the computer, and (2) management of the
operation and control of I/O devices.
Question 3
What are the resources of a computer? Why is the O/S called a resource allocator?
Resources of a computer are CPU cycles, memory space, file storage space, I/O devices, and so
on. The operating system acts as the manager of these resources. Facing numerous and possibly
conflicting requests for resources, the operating system must decide how to allocate them to
specific programs and users so that it can operate the computer system efficiently and fairly.
Question 4
List the four steps that are necessary to run a program on a completely dedicated machine—a computer that is running only that program.
• Reserve machine time.
• Manually load program into memory.
• Load starting address and begin execution.
• Monitor and control execution of program from console.
Question 5
How does the distinction between kernel mode and user mode function as a rudimentary form of protection (security) system?
The distinction between kernel mode and user mode provides a rudimentary form of protection
in the following manner. Certain instructions could be executed only when the CPU is in kernel
mode. Similarly, hardware devices could be accessed only when the program is executing in kernel
mode. Control over when interrupts could be enabled or disabled is also possible only when the
CPU is in kernel mode. Consequently, the CPU has very limited capability when executing in user
mode, thereby enforcing protection of critical resources.
Question 6
What is the purpose of interrupts? What are the differences between a trap and an interrupt?
Can traps be generated intentionally by a user program? If so, for what purpose?
An interrupt is a hardware-generated change of flow within the system. An interrupt handler is
summoned to deal with the cause of the interrupt; control is then returned to the interrupted
context and instruction. A trap is a software-generated interrupt. An interrupt can be used to
signal the completion of an I/O to obviate the need for device polling. A trap can be used to call
operating system routines or to catch arithmetic errors.
Question 7
Which of the following instructions should be privileged?
The following operations need to be privileged:
• Set value of timer
• Clear memory
• Turn off interrupts
• Modify entries in device-status table
• Access I/O device
The rest can be performed in user mode.
Question 8
Describe the differences between symmetric and asymmetric multiprocessing.
What are three advantages and one disadvantage of multiprocessor systems?
Symmetric multiprocessing treats all processors as equals, and I/O can be processed on any CPU.
Asymmetric multiprocessing has one master CPU and the remainder CPUs are slaves. The master
distributes tasks among the slaves, and I/O is usually done by the master only. Multiprocessors
can save money by not duplicating power supplies, housings, and peripherals. They can execute
programs more quickly and can have increased reliability. They are also more complex in both
hardware and software than uniprocessor systems.
Question 9
Direct memory access is used for high-speed I/O devices in order to avoid increasing the CPU’s execution load.
The CPU is allowed to execute other programs while the DMA controller is transferring data.
The CPU can initiate a DMA operation by writing values into special registers that can be
independently accessed by the device. The device initiates the corresponding operation once it
receives a command from the CPU.
When the device is finished with its operation, it interrupts the CPU to indicate the completion
of the operation. Both the device and the CPU can be accessing memory simultaneously. The
memory controller provides access to the memory bus in a fair manner to these two entities. A
CPU might therefore be unable to issue memory operations at peak speeds since it has to
compete with the device in order to obtain access to the memory bus.
Question 10
Give two reasons why caches are useful. What problems do they solve? What problems do they cause?
If a cache can be made as large as the device for which it is caching (for instance, a cache as large as a disk),
why not make it that large and eliminate the device?
• Caches are useful when two or more components need to exchange data, and the
components perform transfers at differing speeds.
• Caches solve the transfer problem by providing a buffer of intermediate speed between the
components. If the fast device finds the data it needs in the cache, it need not wait for the
slower device.
• The data in the cache must be kept consistent with the data in the components. If a
component has a data value change, and the datum is also in the cache, the cache must also
be updated. This is especially a problem on multiprocessor systems where more than one
process may be accessing a datum.
• A component may be eliminated by an equal-sized cache, but only if: (a) the cache and the
component have equivalent state-saving capacity (that is, if the component retains its data
when electricity is removed, the cache must retain data as well), and (b) the cache is
affordable, because faster storage tends to be more expensive.
Question 11
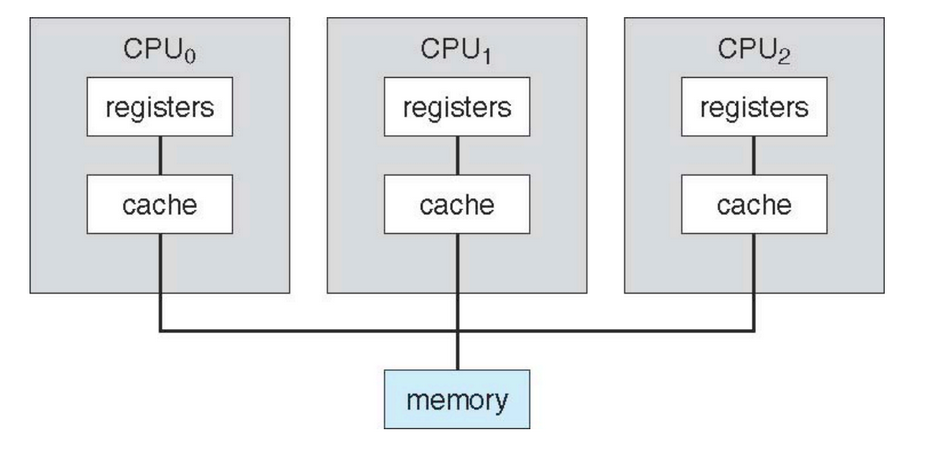
Consider an SMP system similar to what is shown below.
Illustrate with an example how data residing in memory could in fact have two different values in each of the local caches.
Say processor 1 reads data A with value 5 from main memory into its local cache. Similarly,
processor 2 reads data A into its local cache as well. Processor 1 then updates A to 10.
However, since A resides in processor 1’s local cache, the update only occurs there and not in the local cache for processor 2.
Question 12
What do you mean by a BUS organized computer?
In a digital computer, CPUs and multiple device controllers are connected through a common bus,
called system bus, to shared memory. For this reason, it is called a bus-organized computer.
Question 13
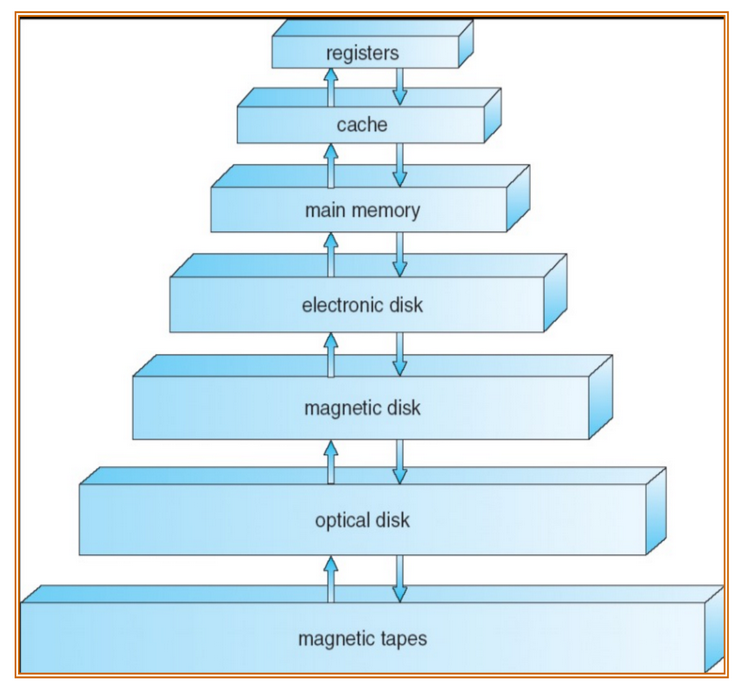
Describe briefly about memory hierarchy.
As the CPU Registers are very fast, memory should be compatible with them. Fast storage tends
to be large, expensive, and power-hungry. We can use levels of increasingly large (and increasingly
slow) storage, with the most likely information to be used soon stored at each level. Often the
information at each larger level is a superset of the information stored at the next smaller level.
Memory levels get slower and larger as they get farther from the processor.
Question 14
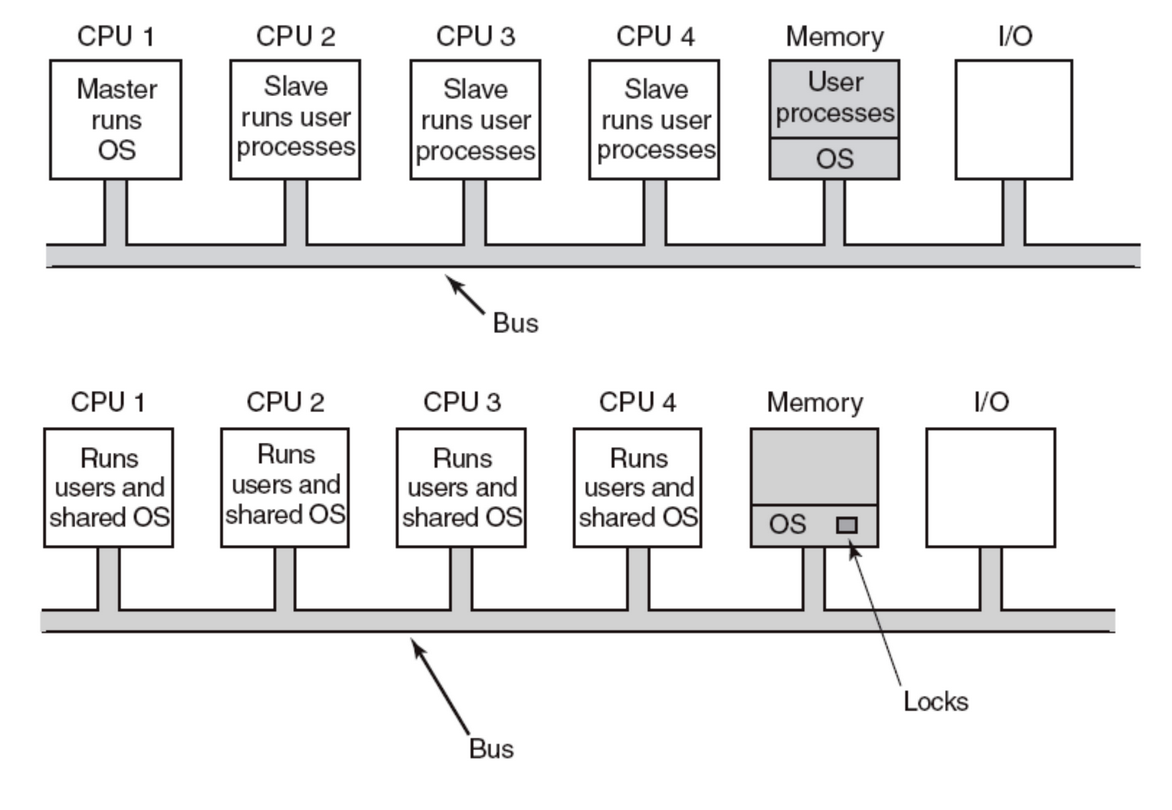
Differentiate between the operating system models handling master-slave multiprocessors and symmetric multiprocessors.
In OS model handling master-slave multiprocessors, one copy of the operating system and its
tables is present on CPU1 and not on any of the others. All system calls are redirected to CPU1 for
processing. This model is called master-slave since CPU1 is the master and all the others are
slaves.
Advantages:
• There is a single data structure that keeps track of ready processes. When a CPU goes idle, it
asks the OS on CPU1 for a process to run and is assigned one. No overloading possible.
• Pages can be allocated among all the processes dynamically.
Disadvantage:
• Since the master CPU must handle all system calls from all CPUs, the master will become a
bottleneck with many CPUs in the system. This model is workable for small multiprocessors.
In OS model handling symmetric multiprocessors, there is one copy of the Operating system in
memory, but any CPU can run it. When a system call is made, the CPU on which the system call
was made traps to the kernel and processes the system call.
Advantages:
• This model balances processes and memory dynamically, since there is only one set of OS
tables.
• This model eliminates the master CPU bottleneck.
Disadvantage:
• Synchronization problem may occur. Mutex (Lock) can be associated with the OS and when a
CPU wants to run OS code, it must first acquire the mutex. If the mutex is locked, it just
waits. Hence any CPU can run the OS, but only one at a time.
Question 15
(i) State and briefly explain the four major reasons for building distributed Systems.
Reasons for Building Distributed Systems:
• Resource Sharing – To provide mechanisms for sharing files at remote sites, processing
information in a distributed database, printing files at remote sites, using remote specialized
hardware devices etc.
• Computation Speedup – Partitioning the computation into sub-computations and running the
sub-computations concurrently at different sites, moving jobs from an overloaded site to other
lightly loaded sites (load sharing).
• Reliability – If one site fails, other sites can continue operating, giving the system better
reliability, and can also be achieved through redundancies in the resources, network, and OS
services.
• Communication – Several geographically distant sites can exchange information through
message passing and higher-level functionalities such as file transfer, remote login, mail, and
remote procedure call can be expanded to distributed systems.
(ii) Reasons for Process Migration
• Load balancing – distribute processes across the network to even the workload.
• Computation speedup – sub-processes can run concurrently on different sites and total
process turnaround time can be reduced.
• Hardware preference – process execution may require specialized processor.
• Software preference – required software may be available at only a particular site.
• Data access – run the process remotely, rather than transfer all data locally if numerous data
are used in the computation.